

惯性传感器内置式伺服稳定跟踪系统解决方案
一、系统概述
惯性传感器内置式伺服稳定跟踪系统是指惯导系统与动中通天线采用一体式设计,惯导系统安装在动中通天线的天线罩内部,如图1所示。这种分体设计具有集成度高、用户使用便捷、惯导系统无需用户自行标定等特点。
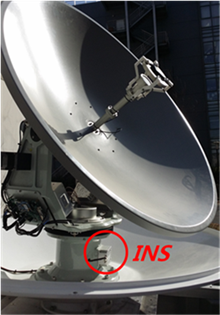
图1 惯导系统内置式动中通天线
二、伺服稳定跟踪系统工作原理
伺服控制系统包括天线控制器单元(ACU)、惯性/卫星组合导航设备单元、信标机单元、控制计算机单元、方位组件单元、极化组件单元、俯仰组件单元七个组成部分。
伺服稳定跟踪系统工作原理如下图2所示:
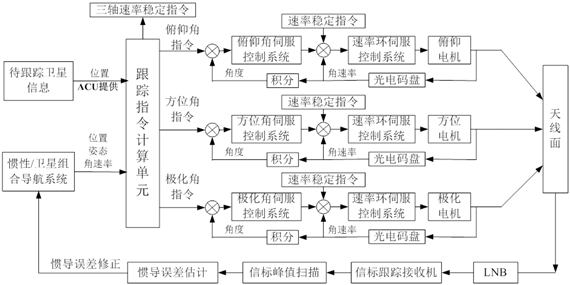
图2 动中通天线伺服稳定跟踪系统原理图
伺服控制系统包括天线控制器单元(ACU)、惯性/卫星组合导航设备单元、信标机单元、控制计算机单元、方位组件单元、极化组件单元、俯仰组件单元七个组成部分。
(1)天线控制器用于用户对控制计算机发送指令,设定待跟踪的卫星的基本信息(卫星位置、信标频率、极化方式等),并监控控制计算机。
(2)惯性/卫星组合导航单元可以给出载体准确的位置信息、姿态信息、角速率信息,用于解算跟踪控制指令,包括三轴速率稳定指令以及方位角指令、俯仰角指令、极化角指令。
(3)信标机单元给出当前频点的卫星信号强度,用于估计天线相对卫星的偏角,同时修正伺服系统的控制误差角。
(4)方位组件用于驱动方位电机旋转,并反馈方位角速率及方位转角。
(5)俯仰组件用于驱动俯仰电机旋转,并反馈俯仰角速率及俯仰转角。
(6)极化组件用于驱动极化电机旋转,并反馈极化角速率及极化转角。
(7)控制计算机用于采集ACU以及惯性/卫星组合导航系统信息,计算出正确的角速率稳定指令以及方位角、俯仰角和极化角,控制方位、俯仰和极化电机运动,通过编码器反馈实现精确控制,通过信标机反馈以及位置信息推出正确的惯导航向,对惯导进行修正,重复上述步骤,实现精确控制。
三、系统工作流程
动中通天线伺服稳定跟踪工作流程如下图3所示,流程可以分为三部分:初始对准寻星、根据惯导输出信号稳定天线和根据信标值扫描跟踪修正。
根据惯导系统输出信号稳定天线:这个过程主要是使用陀螺仪测量角速率信号(经坐标变换)作为前馈,进行角速率稳定控制,同时利用惯导系统输出的俯仰角、横滚角、航向角信息,并结合ACU给定的卫星参数信息,控制电机运动,隔离载体的运动,使得天线始终对准卫星信号,这个过程可以称为是“粗对准”。
根据信标值圆锥扫描跟踪:这个过程主要是使用信标卫星信号强度值作为系统的反馈信号,驱动电机小范围调整天线的方位角和俯仰角,这个过程称为“细对准”。
锁定卫星信号后需要判断这个过程中是否失去卫星信号,卫星信号强度值小于阈值,则系统重新搜索卫星信号。
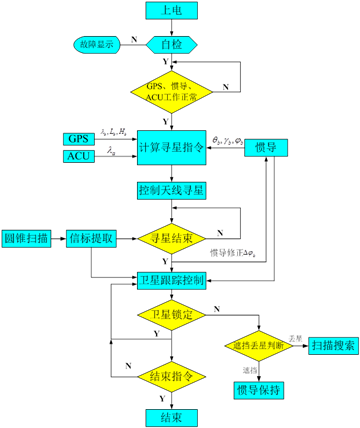
图3 动中通天线伺服稳定跟踪工作流程图
四、技术创新及优势
(1)结合惯性/卫星组合导航以及惯性/信标辅助导航技术,大大提升了系统的运动参数测量精度,降低了成本
星网卫通开发的伺服稳定跟踪系统基于陀螺、组合导航系统、卫星信号三级反馈,使得低成本微惯导组件实现较高的稳定控制精度成为可能。在保证移动卫星通信天线跟踪稳定精度满足要求的基础上,有效降低了惯导的成本,这种革命性的变化使得移动卫星通信天线更加“平民化”,很多原本因成本较高无法使用的场合都有可能因为成本下降而大范围使用。
(2)基于三级反馈的稳定跟踪技术,实现移动卫星通信装置在复杂运动条件下的精确指向
运动传感和反馈控制是卫星天线稳定的基础,传统的天线控制系统往往有两种解决方案:一是采用陀螺角速率反馈直接稳定方案;二是基于高精度惯导系统的姿态反馈方案。
本方案利用陀螺、惯导、卫星信号三级反馈稳定跟踪技术。首先利用陀螺反馈信号进行前馈控制,确保控制的及时性;然后惯导将惯性器件与卫星导航(GPS/北斗)进行信息融合,实现姿态测量的稳定性及准确性,同时利用姿态信号进行二级反馈,确保天线指向角的准确性;最后将卫星信号引入闭环控制系统,用于三级反馈确保天线指向角始终处于信号最大位置。
(3) 基于卫星信标信号识别,解决了低成本惯导系统初始寻北难题
传统的卫星天线寻星算法主要依靠高精度惯性导航系统给出的位置及姿态角信息来计算天线的寻星指令角(俯仰角、极化角、方位角),并控制天线对准卫星。这种方案对惯导系统的要求较高,为了确保天线能够锁定最大的卫星信号,惯导系统的自主寻北精度必须达到0.1°以上,而如此高精度的惯导系统的成本已远远超过移动卫星通信天线本身的成本,这是大多数研制单位和用户无法承受的。为了有效地降低成本,必须选用低精度的惯导产品,而低精度惯导无法自主寻北输出正确的航向,因此,天线无法得到准确的对星指令角。为了解决基于低精度惯导的移动卫星通信天线初始化问题,本系统采用天线方位轴0°-360°扫描加卫星信标信号峰值识别技术来实现天线寻星。通过将两种关键技术融合的方式产生了惯导与方位俯仰组合扫描跟踪技术,惯导提供车辆航向姿态角,天线初步对准,天线方位俯仰组合扫描跟踪获得天线对准及偏差信息通过计算反馈给惯导,惯导误差得以纠正,惯导提供高精度航向姿态信息,天线实现高精度对准,以上过程如此反复,惯导始终保持在低误差、高精度状态,天线也始终保持在高精度对准状态。由于天线通过方位俯仰组合扫描跟踪可以校准惯导,因此惯导不必采用高造价高性能惯导系统,如激光惯导、光纤惯导等,可以大幅降低系统成本。
(4) 提出了一种动中通天线快速动态初始化算法,解决了天线在机动条件下快速使用的难题。
当前,大部分卫星移动通信天线需要在静态或准静态条件下完成初次寻星,待寻星完成后才可以实现稳定跟踪,若系统在动态条件下启动,则系统的寻星时间将大大加长,这种应用要求无法满足快速机动使用的要求。
本解决方案提出一种动态初始化算法,将惯导与天线寻星算法进行一体化设计,将组合导航的航向收敛角作为基准角进行卫星信号的扫描,可大大降低卫星信号的扫描范围,提高信号的捕捉速度及精度,使得天线在各种动态条件下快速完成卫星信号的搜索及锁定,确保系统的机动特性。
北京星网卫通科技开发有限公司版权所有 Copyright © SANETEL Technology All Rights Reserved 京ICP备19041644号-1 加入卫通 | 联系我们 |